









Same Day Dispatch
Description
- Specific for the Gliders and other fixed-wings. Small in form factor, It can be installed in gliders with restricted payload bays such as DLG’s and high performance slopers. Not needing to install an additional altimeter/variometer also saves room and weight.
- The built in barometer provides vertical speed telemetry. The variometer sounds both ascending and descending tones, so you will know whether you are in lift or sink without having to look at your transmitter.
- with ExpressLRS firmware and CRSF protocol, this will also give you other telemetry data like battery voltage, current and GPS related.
Specifications
- ESP8285, SX1281, ExpressLRS Firmware
- RF Frequency: 2.4GHz ISM (2400~2480MHz)
- Antenna connector: IPEX MHF-1
- Telemetry power: 12dbm
- CRSF-PWM-V converter with barometer integrated
- 7x PWM outputs (6x with power rails, PWM8 is just a signal pad)
- PWM frequency: 50, 100, 160, 330, 400Hz configurable
- PWM resolution: 4x 1024 position + 3x 128 position(ExpressLRS 2.0 Wide switch mode)
- 1x UART(2) for GPS
- 36V Max. battery voltage sense (1K:10K voltage divider built-in)
- Compatible with external Current sensor (0~3.3V)
- RxBt,Curr,Capa,Bat%,GPS telemetry and VSpd(Vario)
- Rated voltage: 3.5~9V @5V pad, 0~36V @Vbat, 0~3.3V @Curr
- Power dissipation: 50mA(binding), 90mA(wifi mode)
- No 5V regulator built-in, Servos must be powered via 5V pad on CRSF-PWM-V board by external 5V source.
- Failsafe value configurable
- Firmware upgradeable
- Physical:
- PCB Size: 27x16mm,
- Weight: 5g w/ antenna and 2.54 pins
- Packing:
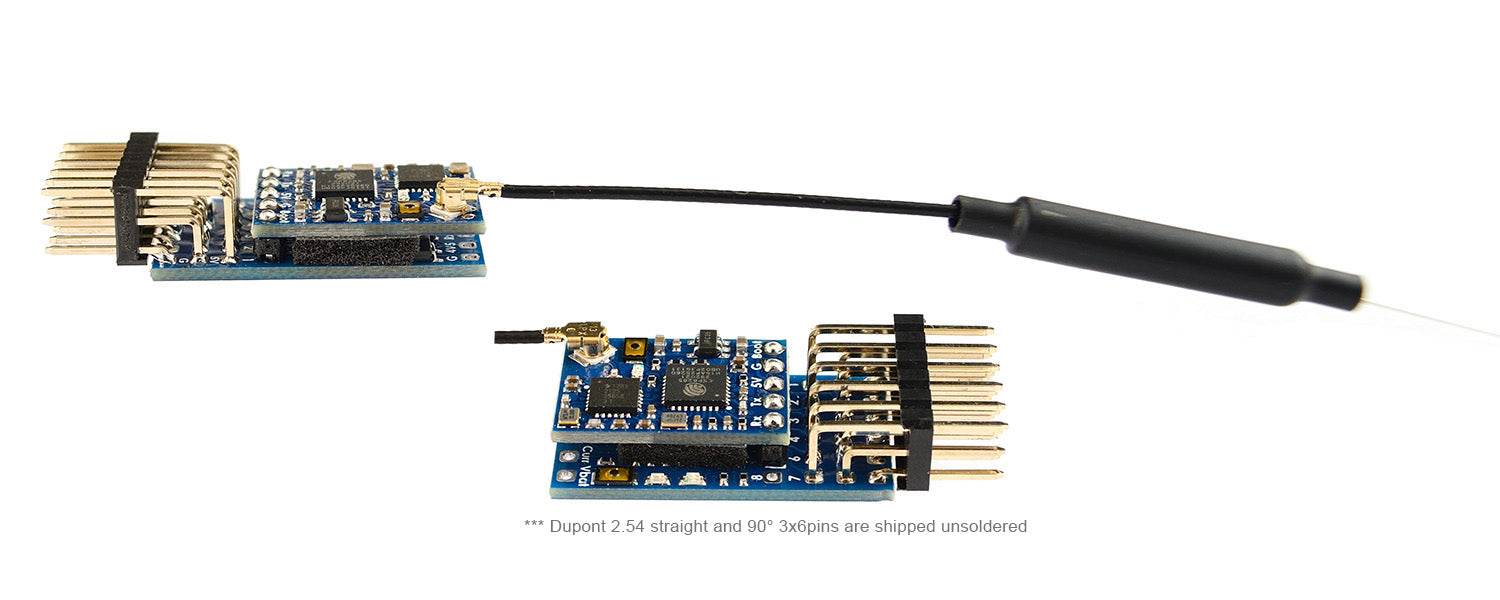
- 1x ELRS-R24-V(includes CRSF-PWM-V and 2.4G Receiver)
- 1x IPEX MHF1 Antenna
- 2.54mm straight and 90° 3×6 Dupont pins
Firmwares
- 2.4GHz Receiver: ExpressLRS /DIY_2400_RX_ESP8285_SX1280, V2.0 or newer
- CRSF-PWM-V: crsf_pwm_v2.0 or newer
Pinouts and Pads
- Tx1/Rx1(UART1) for Receiver integrated
- Tx2/Rx2(UART2) for GPS/firmware update/setting parameters
- 1~8: CH1~CH8 PWM outputs
- Curr: current sensor signal (0~3.3V)
- Vbat: 0~36V Battery voltage sensing
- G: ground
- 4v5 pad voltage = 5V pad voltage -0.3V.
- no 5V regulator built-in, need to power on the board and receiver via external 5V source
Failsafe (FW 2.0.0 or newer)
- CH3 is arranged for the throttle, Failsafe value = 988 by default. you can change the failsafe value of CH3 and other channels by following settings.
- Make sure ESC signal is disconnected from CRSF-PWM board before starting failsafe settings
- Bridge PWM1 and PWM2 signal pad, then power on CRSF-PWM board and receiver.
- Failsafe value will be saved automatically after CRSF-PWM board is powered on and receive CRSF signal. LED blinks 8 times quickly.
- Failsafe value = The PWM value of each transmitter channel when CRSF signal is received by CRSF-PWM board.
- Remove the jumper between PWM 1 and 2, then CRSF-PWM board will work in normal PWM output mode.
LED status
- slow blinks: CRSF-PWM board doesn’t receive CRSF signal, e.g., receiver is not bound with transmitter.
- solid ON: CRSF-PWM board and receiver are working normally
- 5x fast blinks after powering on for 10 seconds: CLI mode is active
GPS telemetry
- Compatible with GPS NMEA protocol, 1Hz, Baud 9600~115200
- GPS “TX” to CRSF-PWM board “RX” Single wire half duplex UART connection, CRSF-PWM board “TX” to GPS “RX” is not essential.
- Support GPS Telemetry ID: GPS, GSpd, Hdg, Alt, Sats
- u-blox series GPS can output “0+1 – UBX+NMEA” protocol by default
- Sensors(GPS, GSpd, Hdg, Alt, Sats) will blink in Transmitter TELEMETRY tab once CRSF-PWM board has connection with GPS.
- Troubleshooting for no GPS telemetry, double check the wiring between GPS and CRSF-PWM board, some u-blox GPS may don’t output NMEA protcol, you need to revert GPS to default configuration in u-center.
- with OpenTX Telemetry Logging, You can plot your flight path or search the lost plane.
VSpd telemetry
- Barometer SPL06-001 (I2C address 0x76) integrated
- VSpd telemetry is supported by ExpressLRS 2.0, EDGE 2.6, OPENTX 2.2 or newer.
TIM & PWM Frequency
- PWM frequency on all 10x Channels can be configured according to TIM
- PWM run at 50Hz by default
- TIM2: CH1, CH2, CH4
- TIM16: CH3
- TIM3: CH5, CH6, CH7, CH8
CLI mode
- If CRSF-PWM board doesn’t detect GPS connected to UART2 within 10 seconds after powering on, CLI mode will active.
- After CLI mode is active, CRSF-PWM board can be connected to configurator via USB-TTL module/FC passthrough.
- in CLI mode, CRSF-PWM board firmware can be updated
- CLI mode has no effect to receiver CRSF signal and PWM outputs
Firmwares
- Pls view CRSF TO PWM CONVERTER page for firmware update of CRSF-PWM-V board
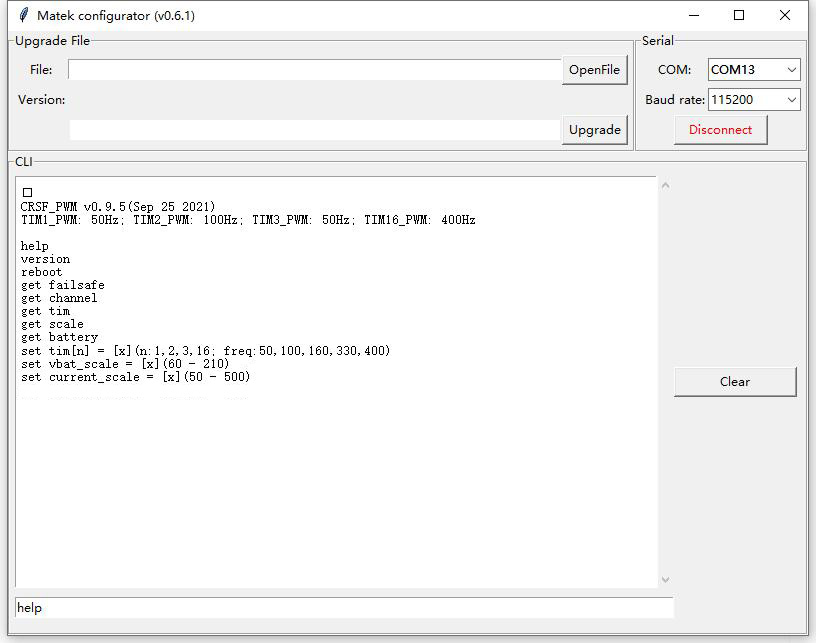
- Tool: Matek Configurator
- via A or B
A. USB-TTL modules, such as CP210x, FTDI
1. Wiring
- TX2 — USB-TTL module RX
- RX2 — USB-TTL module TX
- 4v5 — USB-TTL module 5V
- G — USB-TTL module GND
2. Connect USB-TTL module to PC
3. CRSF-PWM board CLI mode will active after powering on for 10 seconds
4. Open Matek configurator, Select COM port of USB-TTL, Baud rate 115200, Click “Connect”
5. Type command “help”
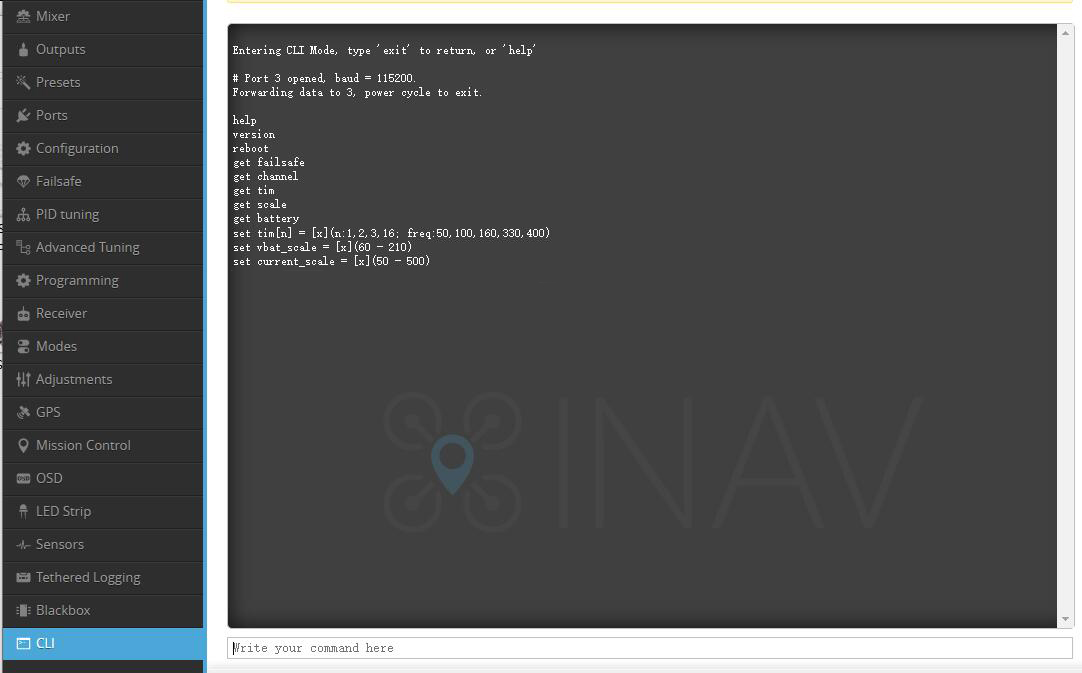
B. INAV/BF serial passthrough
1. Wiring
- TX2 — FC any spare UART_RX
- RX2 — FC any spare UART_TX
- 4v5 — FC 5V or 4V5
- G — FC GND
2. Connect FC USB to PC
3. CRSF-PWM board CLI mode will active after powering on for 10 seconds
4. open INAV/BF configurator, connect FC to configurator
5. click INAV/BF configurator “CLI” tab, type “serialpassthrough x 115200”, x = UART number -1, e.g. CRSF-PWM board connect to FC UART4, type “serialpassthrough 3 115200”.
6. Type command “help”
************************************************************
*************** Type all command with lowercase ***************
************************************************************
help
List all commands
- help
- version
- reboot
- get failsafe
- get channel
- get tim
- get scale
- get battery
- get baro (fw 2.0.0 or newer)
- set tim[n] = [x](n:1,2,3,16; freq:50,100,160,330,400)
- set vbat_scale = [x](60 – 210)
- set current_scale = [x](50 – 500)
- set output_5 = ch[x](11 or 12)
version
list CRSF-PWM firmware version
- CRSF_PWM App v0.9.5(Sep 25 2021)
reboot
restart CRSF-PWM board
- If receiver is connected and bound to transmitter, Failsafe value will be reset according to the transmitter joystick position.
get failsafe
list failsafe value saved
- PWM CH1_failsafe = 1500;
- PWM CH2_failsafe = 1500;
- PWM CH3_failsafe = 988;
- PWM CH4_failsafe = 1500;
- PWM CH5_failsafe = 1000;
- PWM CH6_failsafe = 1000;
- PWM CH7_failsafe = 1000;
- PWM CH8_failsafe = 1000;
- PWM CH9_failsafe = 2000;
- PWM CH10_failsafe = 2000;
get channel
list all channels PWM value according to joystick position if receiver is connected and bound to transmitter
If receiver is not connected or not bound to transmitter, the CH PWM value = failsafe value saved
- CH1 = 1502;
- CH2 = 1500;
- CH3 = 1007;
- CH4 = 1498;
- CH5 = 1000;
- CH6 = 1000;
- CH7 = 1000;
- CH8 = 1000;
- CH9 = 2000;
- CH10 = 2000;
get tim
list PWM frequency on all TIM
- TIM2 = 50Hz (CH1,2,4);
- TIM16 = 50Hz (CH3);
- TIM3 = 50Hz (CH5,6,7,8);
- TIM1 = 50Hz (CH9,10);
set tim[n] = [x](n:1,2,3,16; freq:50,100,160,330,400)
set PWM frequency on each TIM/CH
- “n” range: 1, 2, 3, 16
- “[x]” range: 50, 100, 160, 300, 400
- TIM2: CH1, CH2, CH4
- TIM16: CH3
- TIM3: CH5, CH6, CH7, CH8
- TIM1: CH9, CH10
- 50Hz by default. Compatible with both old school and modern PWM ESC/servos
- Check ESC and servos datasheet to make sure the ESC and servos can work stably at that PWM frequency you will set.
- Usually Analog servos work at 50Hz only, some digital servos can work at 400Hz. ESC supported by oneshot/DShot can work at 400Hz PWM
- e.g. type “set tim16 = 400”, PWM output on CH3 will run at 400Hz
- e.g. type “set tim2 = 100”, PWM output on CH1, CH2,CH4 will run at 100Hz
get scale
- vbat_scale = 110;
- current_scale = 150;
get battery
list Battery voltage and current, Even if there is no current through the shunt resistor, there may be a certain current reading due to the offset and tolerance of current sensor.
- voltage = 0(mV);
- current = 0(mA);
get baro (fw 2.0.0 or newer)
list barometer altitude and temperature, support MS5611 (I2C address 0x77) and SPL06-001 (I2C address 0x76)
- SPL06: alti = 10(cm), temp = 20(C);
set vbat_scale = [x](60 – 210)
- 1K:10K resistor: 110 by default
- Because of components tolerance you can adjust this to match with multimeter readout.
set current_scale = [x](50 – 500)
- current_scale = 150 by default
- If current readout 10A on telemetry, 10.8A on current meter, you can set the scale to (10.8/10)*150=162
- For using external current sensor on CRSF-PWM-6, You can adjust this value to match with the scale of external current sensor.
set output_5 = ch[x](5/11/12)
- output_5 pin is defined as CH5(AUX1) by default, ELRS AUX1(CH5) is 1-bit / 2-position channel.
- In ELRS 2.0 Wide switch mode, AUX2-AUX8(CH6~CH12) are 7-bit (128 position) for telemetry ratios 1:128 through 1:8, or 6-bit (64 position) for 1:4 and 1:2.
- with this CLI command, You can remap AUX7(ch11) or AUX8(ch12) signal to output_5 pin of CRSF-PWM board. then you will get 128-position channel instead of 2-position on “output 5” pin
- Receiver has ExpressLRS 2.2.0 preloaded with binding phrase “123456”, the Receiver will never enter binding mode if using the traditional binding procedure.
- It must be flashed without a binding phrase to do traditional binding OR flashed with your binding phrase.
ExpressLRS wiki
Flashing via Wifi
- Disconnect ESC and servos from receiver first.
- Power on receiver by 5V source. Receiver’s LED(Red) will blink slow at first, and after 20s, it should blink fast indicating it’s on Wifi Hotspot Mode.
- More detailed steps, pls refer this page.
- Target: DIY_2400_RX_ESP8285_SX1280_via_WIFI
Flashing via UART
- Disconnect ESC and servos from receiver first.
- Wire the receiver into the USB-TTL adapter, with TX on receiver connected to the Rx on the USB-TTL, and RX on receiver connected to the Tx of the USB-TTL. Wire 5V and GND of the USB-TTL to 5V and GND of the Receiver.
- Press the boot button while powering on the receiver and CRSF-PWM board, (either button on reeciver board or button on CRSF-PWM-V board). and release – the Red LED on receiver should now be solid. and Blue LED on CRSF-PWM-V should now be fast blink
- Select the target DIY_2400_RX_ESP8285_SX1280 and “UART” for Flashing Method, set your bind phrase and Firmware Options and once done, click on Build and Flash.
Why order from Rising Sun FPV?
• Orders ship out of Townsville, QLD, Australia at 1530.
• Active on Instagram - Tag us or DM us!
• Watch what we are up to on our YouTube Channel!
• Join our Facebook Page for updates and RSFPV news.
• GST Registered.
• Gifts with every order!
• Veteran Owned and Operated
• Defence and Service discounts - Apply Here
• 3D Printing and Custom design – Inquire Here.
• Visit us at our Store and have a yarn.
• Sponsor of Townsville FPVR, Next Level FPV
and the Australian Army Drone Racing Team.
• FPV Drone service, support and repairs.
• Earn points for every $1 spent.
• Buy now and pay later with Zippay, Afterpay, Humm and Laybuy.